Table of Contents
[TOC]
卡尔曼滤波器
卡尔曼滤波器是一种有效的递推滤波器,通过一系列噪声测量估计线性动态系统的内部状态.
The Kalman filter is an efficient recursive filter estimating the internal-state of a linear dynamic system from a series of noisy measurements.
估计误差:\(e_{EST}\) error estimate
测量误差:\(e_{MEA}\) error measurement
卡尔曼增益:\(K_k\) Kalman Gain
如:在k时刻
① \({e_{EST}}_{k-1} \gg {e_{MEA}}_{k}\) 那么\(K_k \to 1\) , \(\hat{x}_k = x_k\)
① \({e_{EST}}_{k-1} \ll {e_{MEA}}_{k}\) 那么\(K_k \to 0\) , \(\hat{x}_k = \hat{x}_{k-1}\)
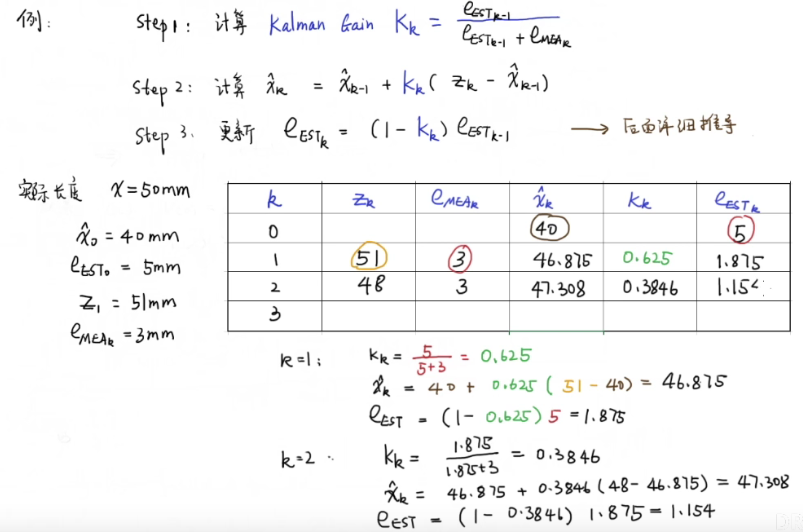
step 1:计算\(K_k\)
step 2:计算\(\hat{x}_k = \hat{x}_{k-1} + K_k(x_k -\hat{x}_{k-1})\)
step 3:更新估计误差\(e_{EST} = (1-K_k){e_{EST}}_{k-1}\)
取均值
比如k次x均值:
均值\(\hat{x}_k = \frac{1}{k}(x_1+...+x_k) = \frac{1}{k} \frac{k-1}{k-1} (x_1+...+x_{k-1}) + \frac{1}{k} x_k = \frac{k-1}{k} \hat{x}_{k-1} + \frac{1}{k} x_k = \hat{x}_{k-1} + \frac{1}{k}(x_k -\hat{x}_{k-1})\)
当前的估计值 = 上一次的估计值 + 系数 x (当前测量值-上一次的估计值)
系数就是卡尔曼增益,用\(K_k\)
随着k的增加,测量的结果不再重要
欧拉公式
证明(Proofs):
令函数
求导
所以\(f(\theta )\)是个常数,我们知道\(f(0) = 1\)所以,对于所有的自变量\(f(\theta) = 1\),得证。
傅里叶分析、傅立叶变换、傅立叶级数
傅里叶分析之掐死教程(完整版)更新于2014.06.06
视频 - 纯干货数学推导_傅里叶级数与傅里叶变换


![]()
傅里叶分析(Fourier analysis)可分为傅里叶级数(Fourier Series)和傅里叶变换(Fourier Transformation)
基础的正弦波a.sin(wt+θ)中,振幅(a),频率(w),相位(θ)缺一不可
频域(Frequency domain):
傅里叶分析究竟是干什么用的?
-
滤波(Wave filtering)是将信号中特定波段频率滤除的操作,是信号处理最重要的概念之一。
-
求解微分方程
因为除了要计算加减乘除,还要计算微分积分。而傅里叶变换则可以让微分和积分在频域中变为乘法和除法,大学数学瞬间变小学算术有没有。
函数的正交性:如:三角函数的正交性\(\int_{-\pi}^{\pi} \sin (nx) \cos (mx) = 0\)(当然这并不完整)
三角函数系:{1,sinx,cosx,sin2x,cos2x,sin3x,cos3x,sin4x,cos4x,...}
三角函数系在其一个周期[-pi,pi]上具有正交性
即三角函数系中任何两个不同的函数的乘积在[-pi,pi]上的积分都等于零
周期函数:以\(T\)为周期的函数\(f(x+T) = f(x)\)
取\(\xi = \frac{2\pi x}{T}\), 则\(y(\xi) = f(\frac{T}{2\pi}\xi)\),且有
\[y(\xi+2\pi) = f(\frac{T}{2\pi}(\xi+2\pi)) = f(\frac{T}{2\pi}\xi+T) = f(\frac{T}{2\pi} \xi) = y(\xi)\]
因此,只研究周期为\(2\pi\)的函数就可以了。
以\(2\pi\)为周期的函数的Fourier级数展开为
其中\(a_0,a_n,b_n,n = 1,2,...\)称为\(f(x)\)的Fourier系数,由下面的Euler-Fourier公式给出
上面的Euler-Fourier公式很容易计算:
首先对上述Fourier级数展开等式两边同时乘以\(\cos mx\),再对其在[-pi,pi]求积分
第一项:\(\int_{-\pi}^{\pi} \frac{a_0}{2} \cos(mx) dx = \frac{a_0}{2}\int_{-\pi}^{\pi} 1.\cos(mx) dx \) 由三角函数的正交性\(\int_{-\pi}^{\pi} 1.\cos(mx) dx=0\)
第三项由三角函数的正交性也一定等于0
第二项\(\int_{-\pi}^{\pi}\sum_{n=1}^{\infty} a_n \cos (nx)\cos (mx)dx\)由三角函数的正交性,能唯一保留下来的就是\(n=m\)时的一项\(\int_{-\pi}^{\pi} a_n \cos (nx)\cos (mx)dx = a_n \int_{-\pi}^{\pi} \cos (nx)\cos (mx)dx = a_n\pi\)
所以\(\int_{-\pi}^{\pi} f(x)\cos (mx) dx = a_n\pi ,m=n\)不就是\(a_n = \frac{1}{\pi} \int_{-\pi}^{\pi} f(x)\cos(nx)dx\)
同理求\(b_n\)时, 对等式左右两边同时乘以\(\sin(mx)\),再求积分
以\(T=2L\)为周期的函数的Fourier级数展开为:\(\omega = \frac{\pi}{L}= \frac{2\pi}{T}\)
傅里叶级数的复数形式:\(\cos x = \frac{1}{2}(e^{ix} + e^{-ix}) , \sin x = -\frac{1}{2}i(e^{ix} - e^{-ix})\)
带入得到
而\(\frac{a_0}{2} = \sum_{n=0}^0 \frac{a_0}{2} e^{in\omega t}\)
所以
从傅里叶级数推导傅里叶变换
非周函数,也就是周期\(T \to \infty\)
Fourier transform(FT) :就是中间部分
Fourier inversion transform(FIT):
Laplace transform: \(s=i\omega\) (Fourier transform看作一种特殊的Laplace transform)
tools
比如几何画板,Graphing Calculator 3D,grafeq, chaoscope,Mathstudio
微积分
wolframalpha
数学图形/数学工具
https://www.wolframalpha.com/ 这个网站其实是一个计算知识引擎
- 在线积分计算器
- 逆矩阵、行列式、利息、房贷等
mathematica
https://www.wolfram.com/mathematica/
gnuplot
交互式绘图工具
http://www.gnuplot.info/
你可以在c#程序中编写数据文件,从c#调用gnuplot可执行文件,并在c#图片框中显示生成的图像。
数学动画、数学图形
Desmos
图形计算器
比如:在网站中输入cos x + 0.1 cos 10x + 0.1 cos 100x
李萨如曲线:
Meta的Logo
What is the Meta logo?
Manim
Geogebra
各种计算机(图形、科学)
https://www.geogebra.org/graphing